
Описание алгоритмов функционирования прибора КСМ2
Прибор микропроцессорный контроллёр КСМ2 может работать в режиме транслятора информации с датчиков на верхний уровень АСУ ТП. Выходные ключи при этом могут управляться только командами с ЭВМ верхнего уровня АСУ ТП.
Режим управления электрозадвижкой осуществляется как по командам ЭВМ верхнего уровня АСУ ТП, так и по состоянию входных сигналов прибора. При их наличии происходит формирование дискретных управляющих сигналов, соответствующих сигналам открытия или закрытия данной электрозадвижки. Далее программа ожидает достижения требуемого состояния, что обнаруживается соответствующим изменением состояния концевых выключателей электрозадвижки.
Если в течение регламентированного времени требуемое состояние не будет достигнуто или появится сигнал заклинивания исполнительного механизма, формируется сигнал «Авария». Далее (как и в случае штатного завершения работы) снимаются сигналы управления с блока управления электрозадвижкой.
Оператор может остановить задвижку в промежуточном положении командой «СТОП» с ЭВМ верхнего уровня или нажатием кнопки СТОП. Назначение входов при реализации этого алгоритма, а также состояние выходных ключей при изменении нормального состояния входных сигналов приведено в таблице III.5.1. В таблице III.5.2 дано определяемое программой состояние электрозадвижки в зависимости от состояния входов.
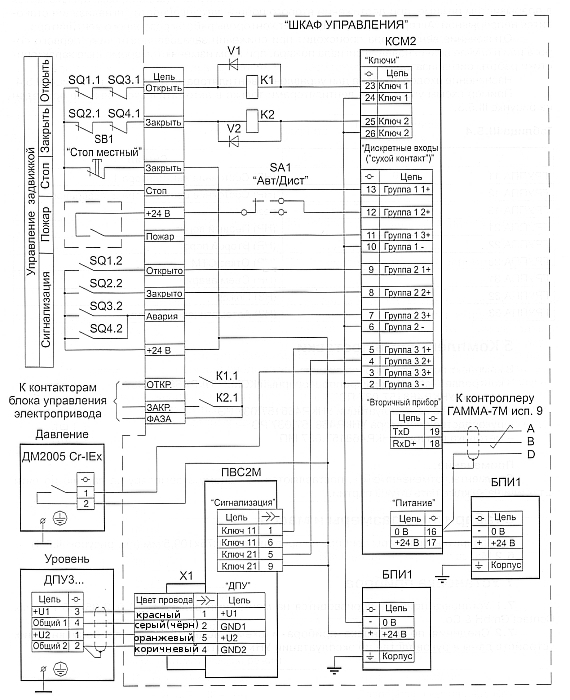
На рисунке III.5.1 приведен пример схемы управления электрозадвижкой, где электрозадвижка закрывается при срабатывании сигнализатора уровня по минимальному уровню в емкости или появлении сигнала отдатчика пожарной сигнализации, а открывается при достижении максимального уровня в емкости или срабатывании электроконтактного манометра. Если какие-либо входы прибора не используются, необходимо привести их в «нормальное» состояние в соответствии с таблицей III.5.1.
Таблица III.5.1
|
Вход |
Сигнал |
Действие (при изменении «нормального» состояния) |
|
ГРУППА 11 |
(НЗ) Кнопка СТОП |
Ключ 1 = Ключ 2 = 0 |
|
ГРУППА 12 |
(НЗ) Автоматический режим |
Ключ 1 = Ключ 2 = 0 |
|
ГРУППА 13 |
(НЗ) Пожар |
Ключ 1=0, Ключ 2=1 (закрыть) |
|
ГРУППА 31 |
(HP) LMAX |
Ключ 1=1, Ключ 2=0 (открыть) |
|
ГРУППА 32 |
(НЗ) Lmin |
Ключ 1=0, Ключ 2=1 (закрыть) |
|
ГРУППА 33 |
(HP) РмАХ |
Ключ 1=1, Ключ 2=0 (открыть) |
Примечание - НЗ - нормально замкнуто, HP - нормально разомкнуто.
Таблица III.5.2
|
Состояние / Вход |
Открыта |
Закрыта |
Промежуточное положение |
Авария | |
|
ГРУППА 21 |
1 |
0 |
0 |
1 |
X |
|
ГРУППА 22 |
0 |
1 |
0 |
1 |
X |
|
ГРУППА 23 |
0 |
0 |
0 |
X |
1 |
Алгоритм управления насосами откачки реализуется с использованием следующих приборов, установленных на дренажных емкостях:
- уровнемер поплавковый ДУУ4М-ТВ с выходным сигналом 4...20 мА;
- датчик уровня ультразвуковой ДУУ2М с контроллером микропроцессорным ГАММА-7М, ГАММА-8М;
- сигнализаторы уровня СУР-3, СУР-4.
Алгоритм обеспечивает автоматическое определение типа уровнемера и работу с ним. Также алгоритм определяет тип датчика давления, установленного на выкидном трубопроводе насоса. Это может быть либо электроконтактный манометр, либо датчик с токовым выходом типа «Метран». Пуск насоса производится при уровне, превышающем уставку по максимуму, и останов при достижении уровнем уставки по минимуму.
Предусмотрен останов насоса при выходе давления на выкидном трубопроводе за установленные пределы, причем такой останов происходит с задержкой времени для пропуска воздушных пробок. Для работы насоса откачки необходимо подать напряжение +24 В на группу 32 прибора.Кроме того, в этом алгоритме неиспользуемые при работе насоса откачки входы прибора позволяют управлять электронагревателями следующим образом: при замыкании датчика-реле температуры нагреватель включается, а при размыкании датчика-реле температуры или при срабатывании датчика пожара - отключается. В этом случае надо подать напряжение -24 В на группы 12, 22 прибора.
Назначение входов прибора для управления насосами откачки и нагревателями приведено в таблице III.5.3.
Таблица III.5.3
|
Вход |
Сигнал |
Действие (при изменении «нормального» состояния) |
|
ГРУППА 11 |
(HP) Состояние агрегата |
Ключ 1 = 1 |
|
ГРУППА 12 |
(НЗ) Pmin |
Ключ 1=0, Ключ 2 =1 |
|
ГРУППА 13 |
(HP) РмАХ |
Ключ 1=0, Ключ 2 =1 |
|
ГРУППА 21 |
(HP) Lmax |
Ключ 1 = 1 |
|
ГРУППА 22 |
(НЗ) Lmin |
Ключ 1 = 0 |
|
ГРУППА 23 |
(HP) Температура |
Если ГРУППА 23 = 1, Ключ 1 = 1 |
|
ГРУППА 31 |
(HP) Съем аварии |
Старт |
|
ГРУППА 32 |
(НЗ) Пожар |
Ключ 1 = 0 |
|
ГРУППА 33 |
(НЗ) Автоматический режим |
Ключ 1 = 0 |
|
Токовый вход 1 |
I1УCT.MIN < I1< I1УСT.МАХ |
Уровень в емкости |
|
Токовый вход 2 |
I2УСТ.MIN < 12 < 12УСТ.МАХ |
Давление на выкиде насоса |
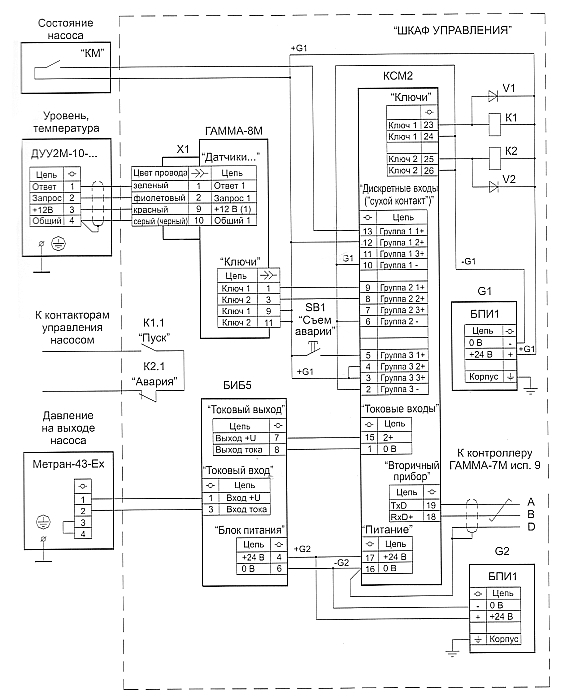
Пример схемы управления насосом откачки с токовым датчиком давления на выкидном трубопроводе приведен на рисунке III.5.2.
Алгоритм управления вентилятором обеспечивает включение вентилятора при достижении первого порога загазованности, при этом сигнализация (сирена, лампа) включается в прерывистом режиме, при достижении второго порога загазованности сигнализация становится непрерывной. Алгоритм предусматривает контороль работы резервного вентилятора.
Отключение вентилятора происходит при снижении загазованности ниже первого
порога или в случае возникновения сигнала пожара, при этом изменяются временные
характеристики работы сигнализатора.
Назначение входов прибора для управления
вентиляторами приведено в таблице III.5.4.
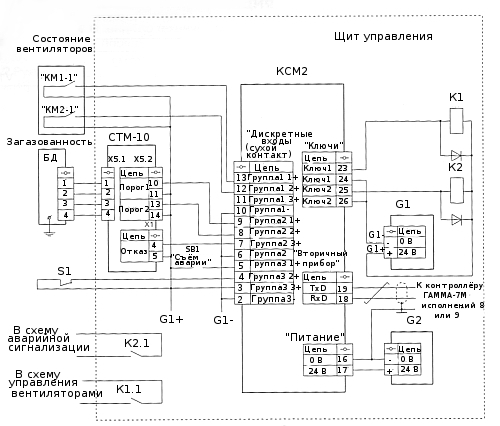
Пример схемы управления вентиляторами только в автоматическом режиме приведен на рисунке III.5.3.
Таблица III.5.4
|
Вход |
Сигнал |
|
ГРУППА 11 |
(HP) Состояние вентилятора 1 |
|
ГРУППА 12 |
(HP) Состояние вентилятора 2 (резервного) |
|
ГРУППА 13 |
резерв |
|
ГРУППА 21 |
(HP) Первый порог |
|
ГРУППА 22 |
(HP) Второй порог |
|
ГРУППА 23 |
(HP) Отказ СТМ |
|
ГРУППА 31 |
(HP) Съем аварии |
|
ГРУППА 32 |
(НЗ) Пожар |
|
ГРУППА 33 |
(НЗ) Автоматический режим |

{kind=link}
{kind=link}
{kind=link}